DENSE-spike and Outdoor-spike
用途:为脉冲相机提供单目深度估计数据集,涵盖合成环境和真实世界场景。 场景类别:
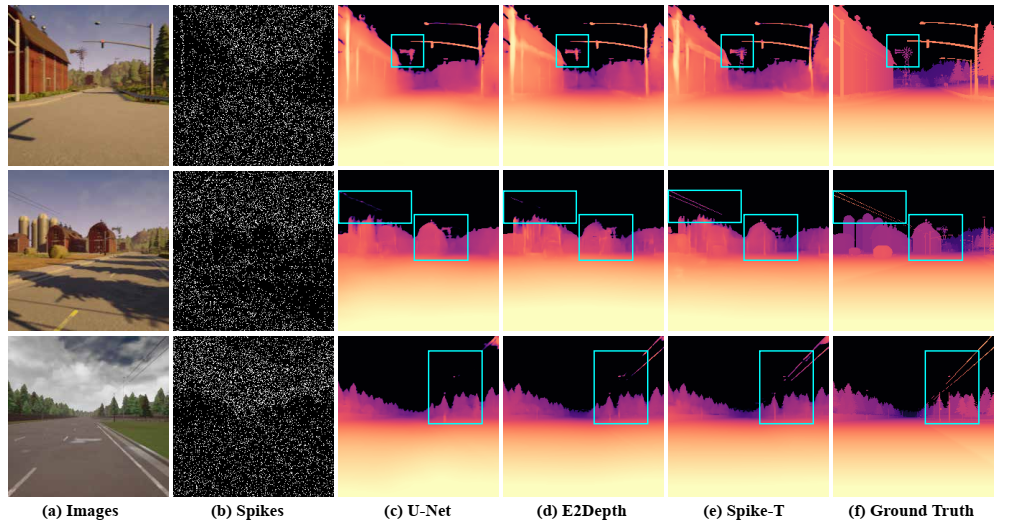
- DENSE-spike:基于CARLA模拟器生成的多样化场景,包括不同天气和光照条件
- Outdoor-spike:真实道路场景,模拟自动驾驶视角 数据格式:
- DENSE-spike:346×260×128(128个时间戳)的脉冲流数据
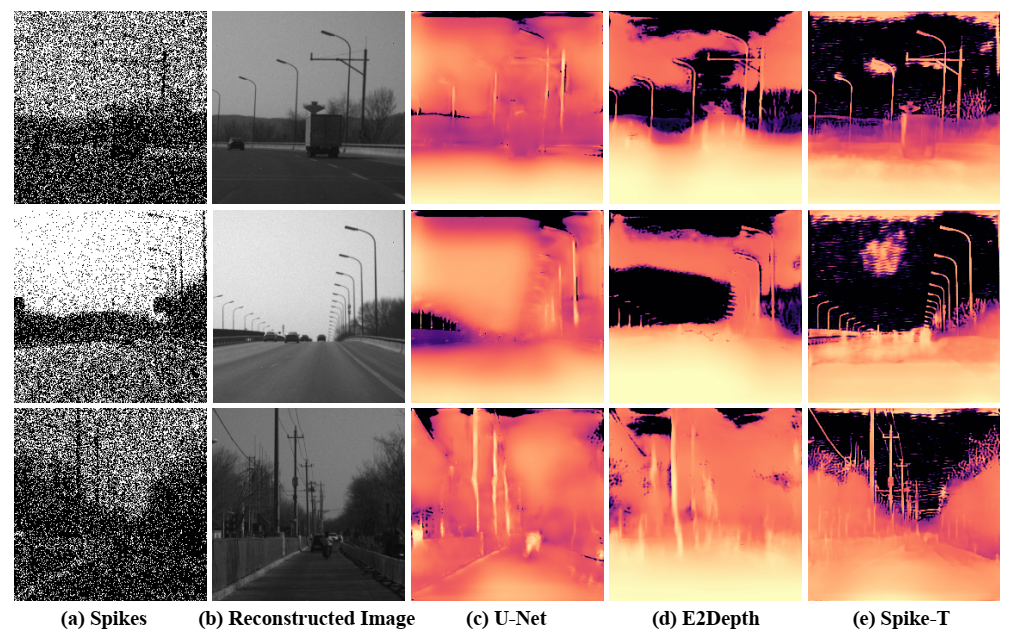
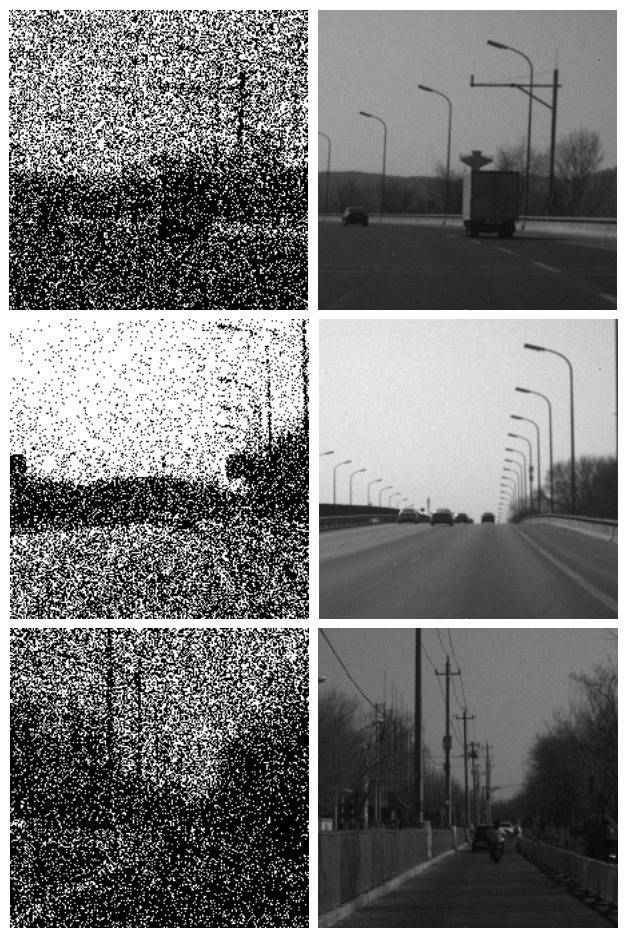
- Outdoor-spike:400×250@40kHz的真实脉冲流数据 数据规模:
- DENSE-spike:8个序列(5训练/2验证/1测试)
- Outdoor-spike:33个真实道路场景序列
数据生成与采集
- DENSE-spike:基于CARLA模拟器生成基础场景,将视频帧率提升至3840fps,通过专业算法转换为脉冲流数据
- Outdoor-spike:使用专业Vidar脉冲相机采集,包含自然噪声和实际光照变化
可支持的任务:
- 单目深度估计:从单通道脉冲流中恢复深度信息
- 跨域迁移:从合成数据迁移到真实场景
- 自动驾驶环境感知:模拟真实自动驾驶视角的深度估计
关键特性
- DENSE-spike:包含高精度深度标签,覆盖多样的天气和光照条件
- Outdoor-spike:真实环境数据,包含自然噪声和实际光照变化
- 互补性:两个数据集相互补充,支持模型从合成到真实的泛化能力验证
数据集链接:
DENSE-spike https://pan.baidu.com/s/1Lg2spMW4OYlsYy0iT4u_7g (password:1008).
Outdoor-spike https://pan.baidu.com/s/1hji5GnFH5Ke_nDt-1Q76rg (password:1997).