
Projects and Datasets
Our laboratory is deeply engaged in cutting-edge fields such as brain-inspired computing, neuromorphic computing, and spiking neural networks. We are committed to unraveling the mysteries of the brain’s information processing and constructing computational paradigms that are closer to biological intelligence.
Based on in-depth analysis of neurodynamics, we break through the limitations of traditional artificial neural networks, develop low-power consumption and highly parallel spiking neural networks, and explore innovative applications of spike coding mechanisms in real-time perception and autonomous learning.
Our team integrates neuroscience, computer science, and microelectronics technology, and has achieved a series of results in areas such as brain-inspired cognitive models and dynamic environment adaptation algorithms. These efforts provide core technical support for the new generation of artificial intelligence, edge computing, and brain-computer interfaces, driving the evolution of intelligent systems toward higher efficiency, robustness, and human-like characteristics.
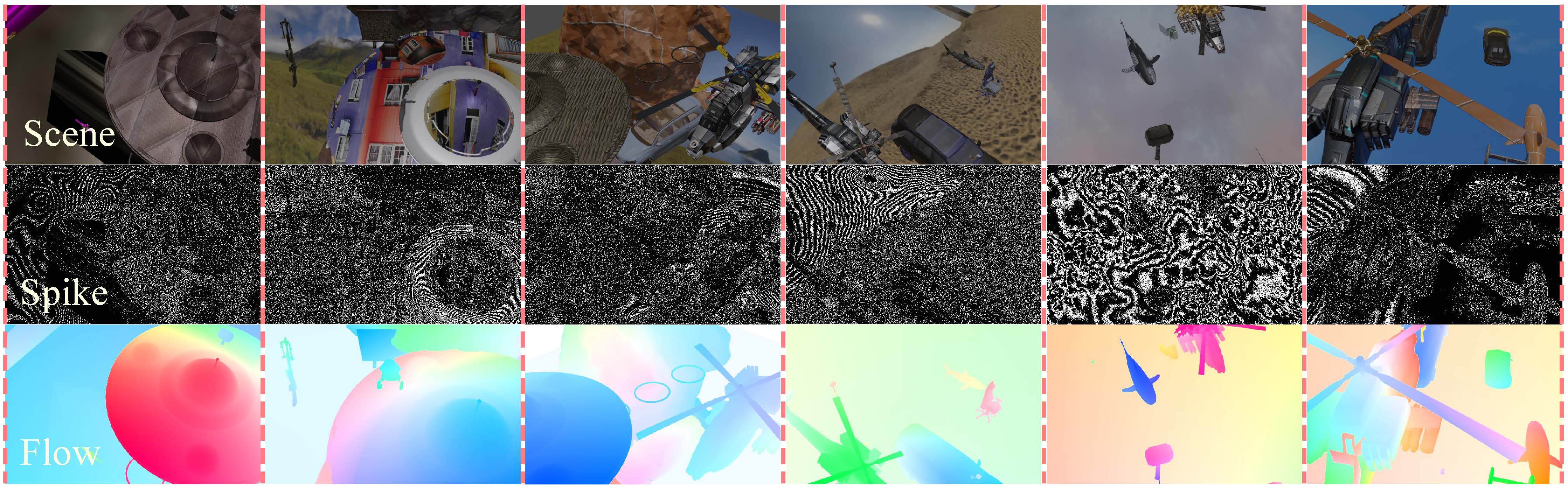
SPIFT(Spikingly Flying Things)
- 用途:主要用作训练集,包含随机生成的高速运动场景。
- 场景类别:100类,每类包含500帧脉冲流。
- 光流标签:每隔10帧(Δt=10)和20帧(Δt=20)生成光流,共50,000帧标签。
- 数据格式:脉冲流为二进制矩阵(H×W×N),光流标签为二维运动矢量场(H×W×2)。
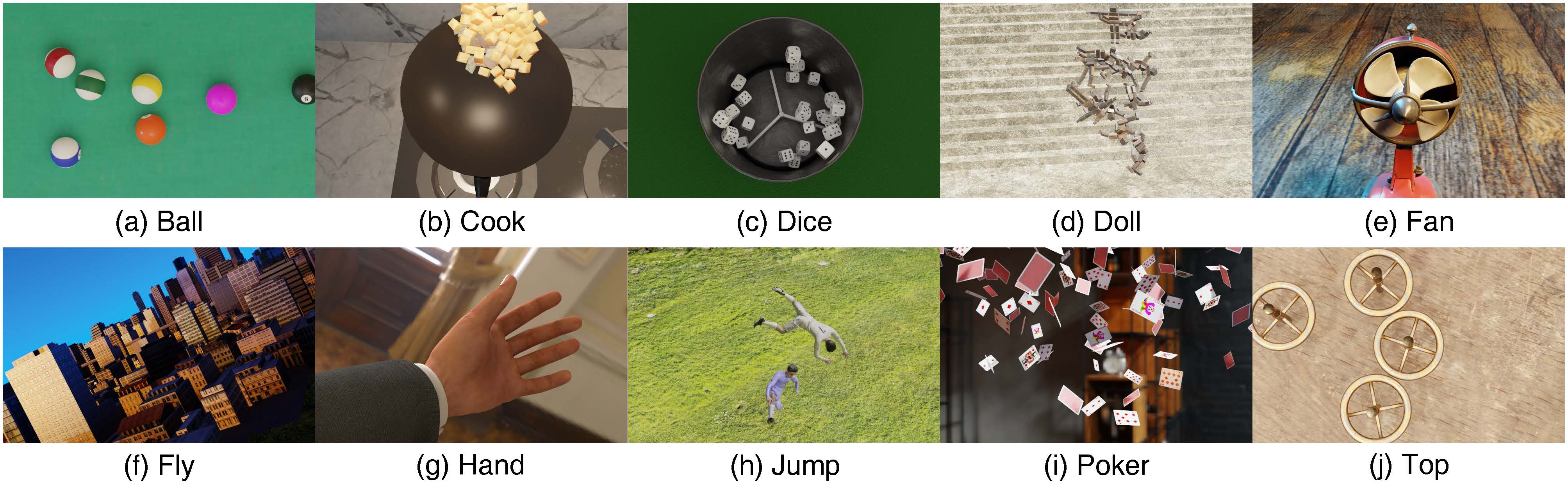
PHM(Photo-realistic High-speed Motion)
- 用途:作为测试集,包含逼真的高速场景。
- 场景类别:10类(如 Ball、Fan、Fly),共约 25,100 帧数据;光流标签覆盖所有像素(100% 密度)。
- 数据格式:与 SPIFT 相同,但场景更复杂。
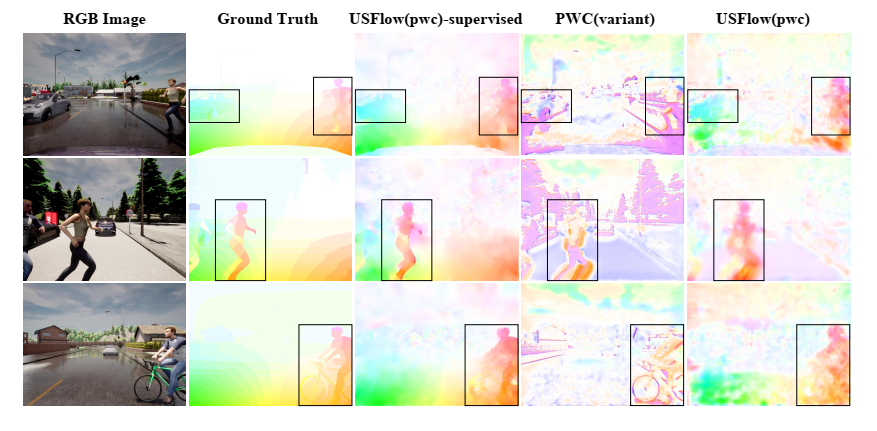
SSES (Spike-based Synthetic validation dataset for Extreme Scenarios in autonomous driving)
- 用途:专注于自动驾驶极端场景的脉冲相机合成数据集,支持无监督光流估计模型的训练与评估。
- 场景类别:10个模拟交通事故的极端场景,涵盖各种街道环境、天气条件(雨天、雾天)和运动目标(车辆、行人/骑行者)。
- 光流标签:基于CARLA模拟器构建,每个数据序列持续0.5-1.5秒。
- 数据格式:脉冲流以40kHz生成,支持微秒级光流分析;包含脉冲流、RGB帧、光流真值、实例分割和深度信息的多模态数据。
RSSF(Real Scenes with Spike and Flow)
解决如下困难与挑战:
- 合成数据与真实场景的差距:传统合成数据(如SCFlow使用的图形模型数据)存在纹理不真实、光照简化、运动模式单一等问题,导致模型在真实场景中泛化能力差。RSSF通过基于真实高分辨率数据集(Slow Flow)模拟脉冲流,显著缩小了这一差距。
- 脉冲流的时间连续性建模:脉冲相机输出的是连续二进制脉冲流,单个脉冲仅反映积分结果而非瞬时状态,传统方法难以提取时空关联特征。RSSF通过多时间步长光流真值(dt=20,40,60)支持连续运动建模,解决了时间信息利用不足的问题。
- 真实数据标注难题:脉冲相机的真实数据难以直接标注光流。RSSF通过模拟生成脉冲流与光流真值的严格对应关系,绕过了真实数据标注的瓶颈。
DENSE-spike and Outdoor-spike
- 用途:为脉冲相机提供单目深度估计数据集,涵盖合成环境和真实世界场景。
- 场景类别:
- DENSE-spike:基于CARLA模拟器生成的多样化场景,包括不同天气和光照条件
- Outdoor-spike:真实道路场景,模拟自动驾驶视角
- 数据格式:
- DENSE-spike:346×260×128(128个时间戳)的脉冲流数据
- Outdoor-spike:400×250@40kHz的真实脉冲流数据
- 数据规模:
- DENSE-spike:8个序列(5训练/2验证/1测试)
- Outdoor-spike:33个真实道路场景序列
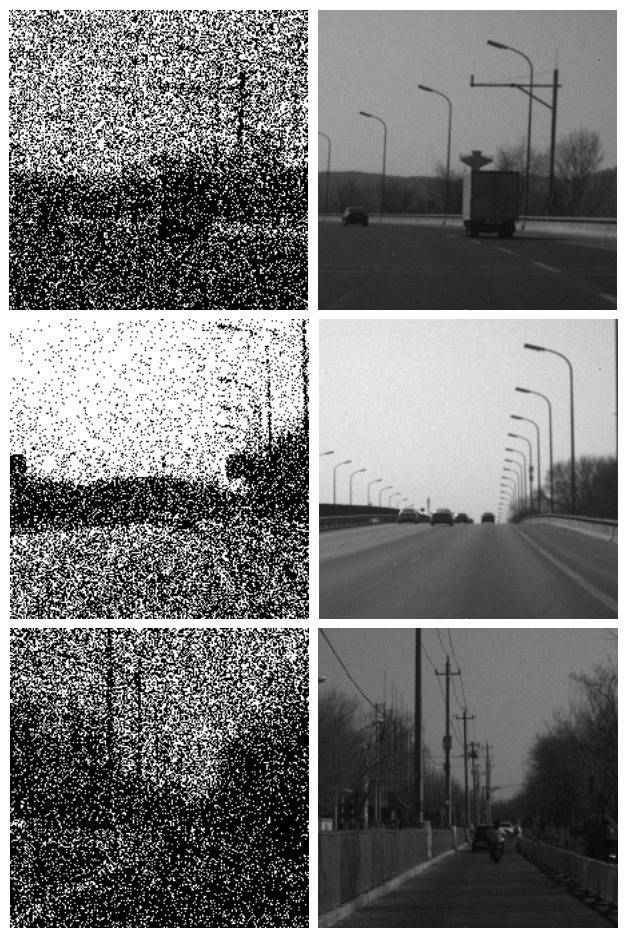
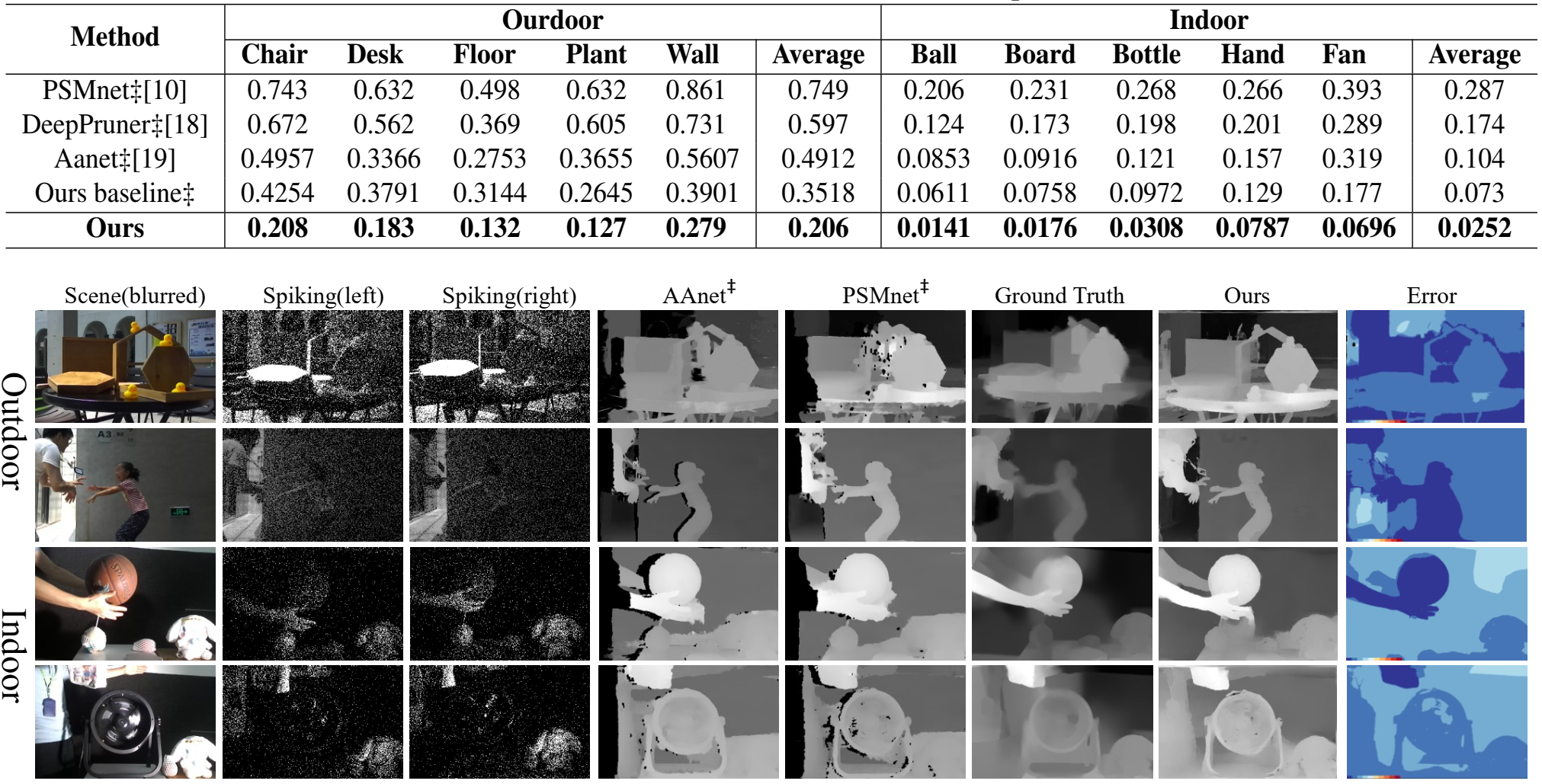
PKU-Spike-Stereo and Spike-KITTI
- 用途:用于双目立体视觉和自动驾驶场景的脉冲数据集。
- 场景类别:
- PKU-Spike-Stereo:利用一个ZED相机和两个脉冲相机去收集同步真实数据
- Spike-KITTI:KITTI数据集的脉冲模拟版本
- 数据格式:
- PKU-Spike-Stereo:ZED相机为1280*720分辨率,30fps;每个脉冲相机为400*250分辨率,20kHz采样率。
- Spike-KITTI:分辨率同KITTI数据集
- 数据规模:
- PKU-Spike-Stereo:10个类别(5个室内5个室外)
- Spike-KITTI:160个训练序列,40个测试序列
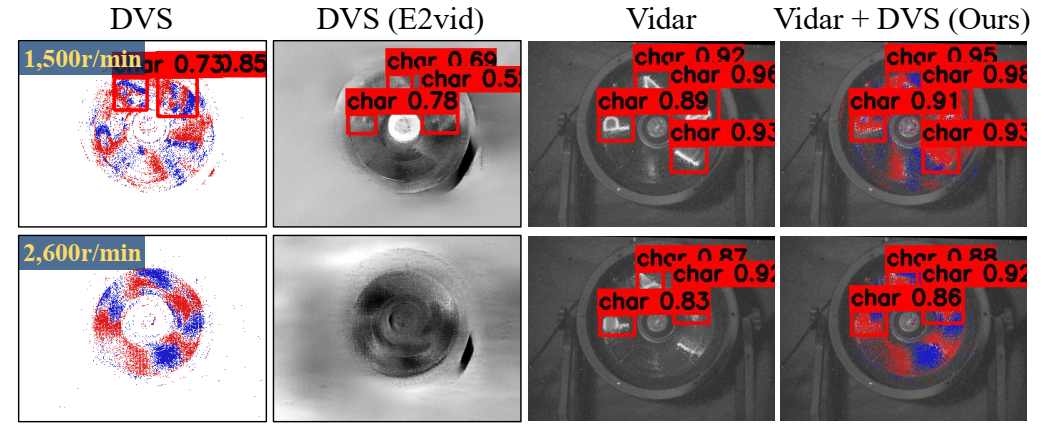
PKU-Vidar-DVS
- 用途:为脉冲相机提供多模态异步目标检测数据集,用于高速物体检测、低光环境感知和多模态融合算法验证。。
- 场景类别:包含高速运动、低光照条件、复杂背景等6种多样化场景,覆盖室内和室外环境。。
- 数据格式:
- Vidar(类中央凹视觉): 脉冲流(Spikes),400×250分辨率,20,000Hz采样率
- DVS(类周边视觉): 异步事件流(Events),每秒1200万事件,微秒级时间分辨率
- 数据规模:490段序列(每段约5秒),50Hz标注频率,总标注框数达215.5k,覆盖9类物体。
recVidarReal2019
- 用途:专注于高速目标检测与跟踪的数据集,支持SNN算法开发与超高速视觉系统测试。
- 场景类别:ClassA(动态物体和旋转场景)和ClassB(大场景和高速运动)。
- 数据特性:图像分辨率400×250,采样频率20,000 Hz,二进制spike事件流。
- 应用方向:高速运动目标跟踪、大场景三维重建、旋转物体姿态估计、交通监控系统等。
motVidarReal2020
- 用途:基于事件相机的多目标跟踪数据集,主要关注数字目标的跟踪。
- 数据特性:采样率高达20kHz(20000fps),时间分辨率比传统相机提升300-600倍。
- 技术优势:不受曝光时间限制,避免运动模糊,特别适合高速运动场景。
- 应用方向:高速运动目标跟踪、事件流重建算法、跨模态研究、自动驾驶等实际应用场景。

momVidarReal2021
- 用途:包含51段真实场景脉冲序列的高速视觉数据集,用于促进算法研究和开发。
- 场景类别:运动球类场景(13个序列)、复杂运动场景(8个序列)、特殊场景(8个序列)、生活场景(22个序列)。
- 数据特性:图像分辨率400×250,采样频率20,000 Hz,二进制spike事件流。
- 应用方向:图像重建、高速目标检测与追踪、运动分析(分割、光流估计、轨迹分析)、相机自运动研究等。
For a list of recent research ouputs, visit our publications page.